创建动作
当需要执行一个具体的任务时,可以在项目中创建一个动作。以下是创建动作的两种方式:
- 添加空白步骤创建动作
- 从已有动作复制步骤创建动作
添加空白步骤创建动作
添加「镜像代码执行」步骤创建动作
以创建一个「解压文件」的动作为例,介绍如何通过添加「镜像代码执行」步骤创建动作。
-
进入项目,在「自动化-动作」页面,点击【创建动作】按钮。
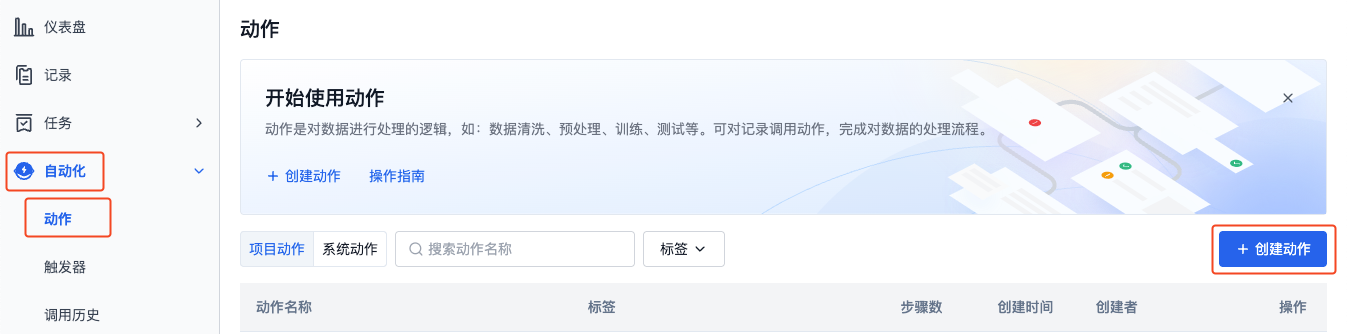
-
在创建动作页面,填写动作名称、步骤等信息。
-
动作名称:解压文件

-
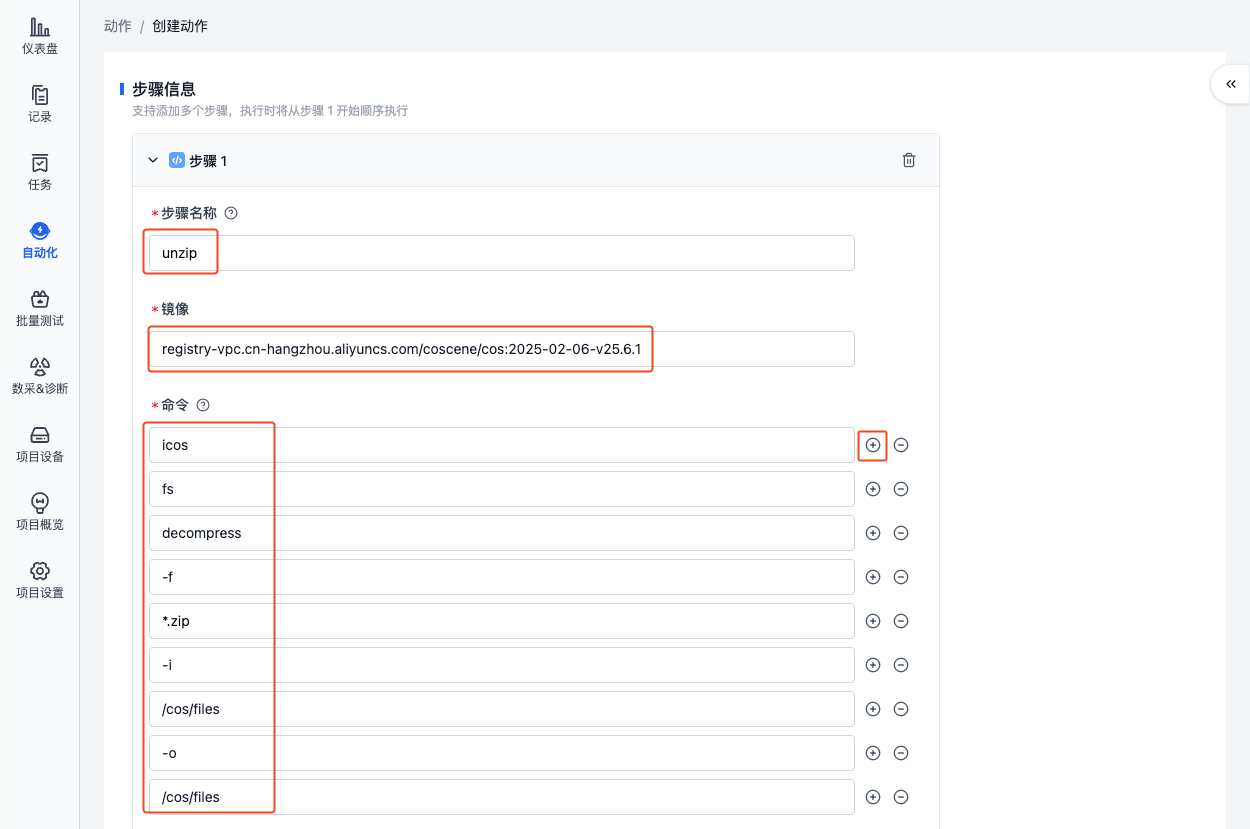
添加「镜像代码执行」步骤:

-
步骤名称:unzip
-
镜像:registry-vpc.cn-hangzhou.aliyuncs.com/coscene/cos:2025-02-06-v25.6.1
- 该镜像为刻行时空提供的镜像,内置
icos工具,仅支持在平台内部使用,了解镜像
- 该镜像为刻行时空提供的镜像,内置
-
命令:icos fs decompress f *.zip -i /cos/files -o /cos/files
- 调用
icos工具,对/cos/files目录(记录)下名称符合*.zip的文件进行解压,将其输出到原记录 - 需一行填写一个参数,如第一行填写
icos,第二行填写fs,以此类推
- 调用
-
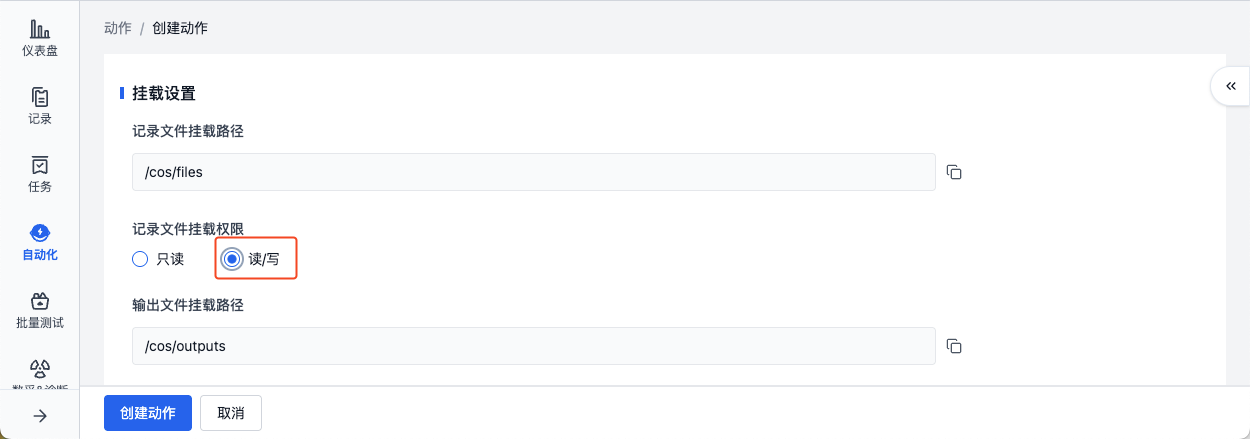
记录文件挂载权限:读/写
- 允许该动作在执行期间对原记录进行读写操作
-
点击【创建动作】按钮,完成动作创建。调用此动作可对记录中名称符合
*.zip的文件进行解压。
添加「HTTP 请求」步骤创建动作
以创建一个「发送钉钉通知」的动作为例,介绍如何通过添加「HTTP 请求」步骤创建动作。
-
进入项目,在「自动化-动作」页面,点击【创建动作】按钮。
-
在创建动作页面,填写动作名称、步骤等信息。
-
动作名称:发送钉钉通知

-
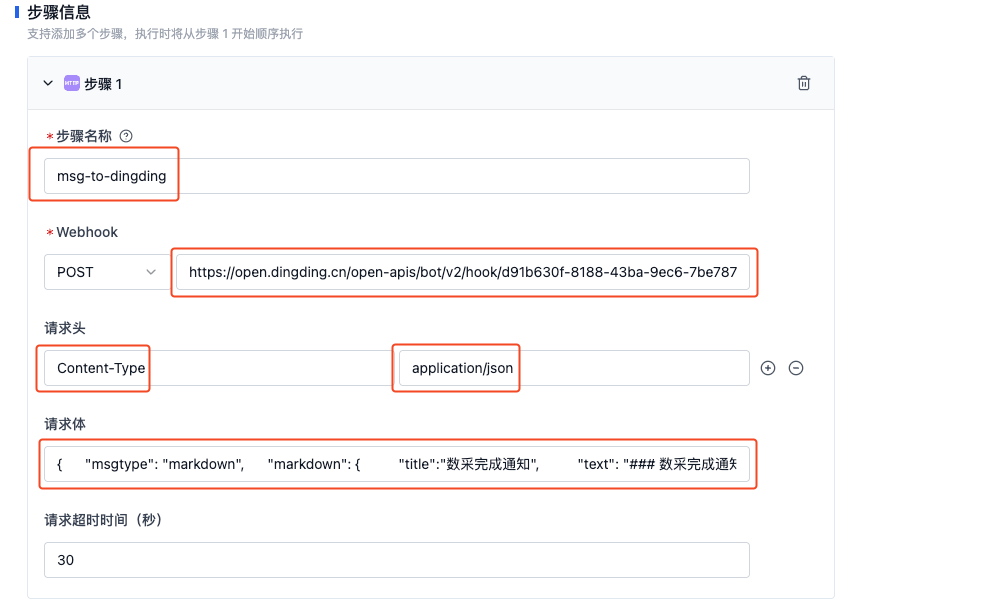
添加「HTTP 请求」步骤:
-
步骤名称:msg-to-dingding
-
Webhook:从钉钉自定义机器人中获取 Webhook 地址,具体步骤如下:
- 创建钉钉群
- 进入钉钉群,创建自定义机器人。详见钉钉开发平台自定义机器人接入
- 复制机器人的 Webhook 地址
-
请求头:
Content-Type:application/json -
请求体:
{
"msgtype": "markdown",
"markdown": {
"title":"数采完成通知",
"text": "### 数采完成通知 \n #### 任务名称:{{task.title}} \n #### 点击 [查看记录]({{record.link}}) \n"
}
}-
其中,有部分平台内置的变量:
变量 说明 {{task.title}}任务名称 {{record.link}}记录链接 {{device.id}}设备 ID {{device.display_name}}设备名称 {{task.create_time}}任务创建时间 -
此动作一般用于发送任务完成通知,可根据实际需求修改请求体内容,详见钉钉的帮助文档
-
-
点击【创建动作】按钮,完成动作创建。调用此动作可发送钉钉通知。

从已有动作复制步骤创建动作
以创建一个「解压文件」的动作为例,介绍如何通过从已有动作复制步骤创建动作。
-
进入项目,在「自动化-动作」页面,点击【创建动作】按钮。
-
在创建动作页面,填写动作名称、从已有动作复制步骤。
-
动作名称:解压文件
-
添加步骤:从已有系统动作「解压文件」复制「main」步骤

-
添加参数:添加参数
filename,值为*.zip,供命令{{parameters.filename}}引用此参数,表示对指定目录下名称符合*.zip的文件进行解压
- 点击【创建动作】按钮,完成动作创建。调用此动作可对记录中名称符合
*.zip的文件进行解压,并将结果输出到「调用详情」的「输出」页面。