远程控制设备
在刻行时空平台可以实时远程操作设备,例如远程下发命令,SSH 连接等操作,提升运维能力。
前提条件
实时可视化
进行设备可视化之前,需在目标机器上安装 coBridge 组件,该组件将会作为一个单独的 ros node 运行,并通过 websocket 协议将订阅的数据传递至前端。
刻行将会提供 coBridge 源码(C++),目前支持包括 ROS1 Noetic Ninjemys, Melodic Morenia; ROS2 Foxy Fitzroy, Galactic Geochelone, Humble Hawksbill 等 ROS DISTRIBUTION,若有其他版本需求,请联系刻行团队。
强烈建议用户使用刻行提供的源码编译出可执行文件(编译流程文档:CN/EN),将其整合进机器人软件中,并在机器人启动脚本添加 ros2 launch coBridge coBridge_launch.xml (或者 roslaunch coBridge coBridge_launch.xml)命令。
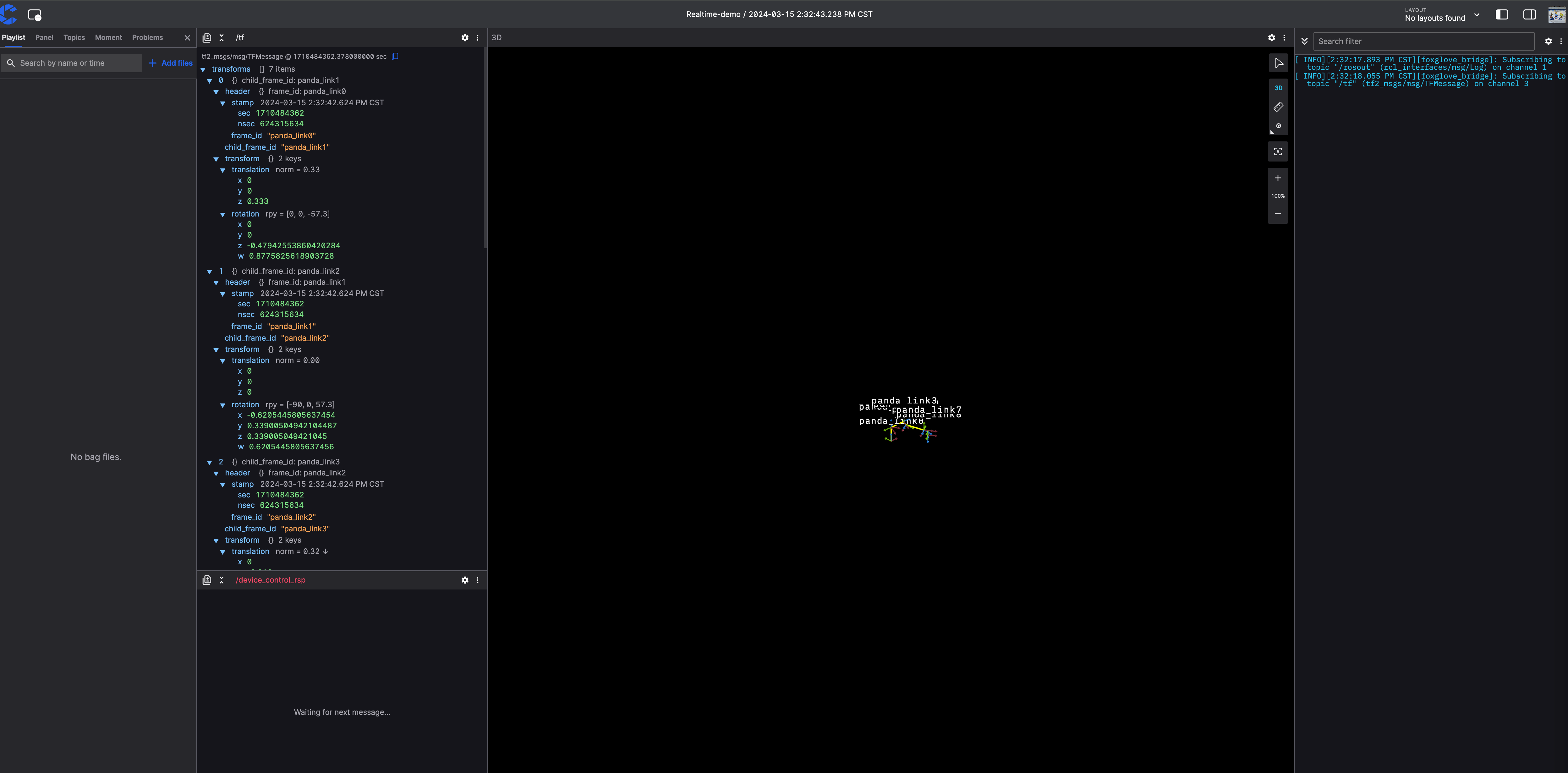
coBridge 节点启动后,配合 virmesh 映射的外网地址及端口,可在网页端实现订阅机器人 topic,下发 service 等操作,实现对机器人的远程实时可视化。
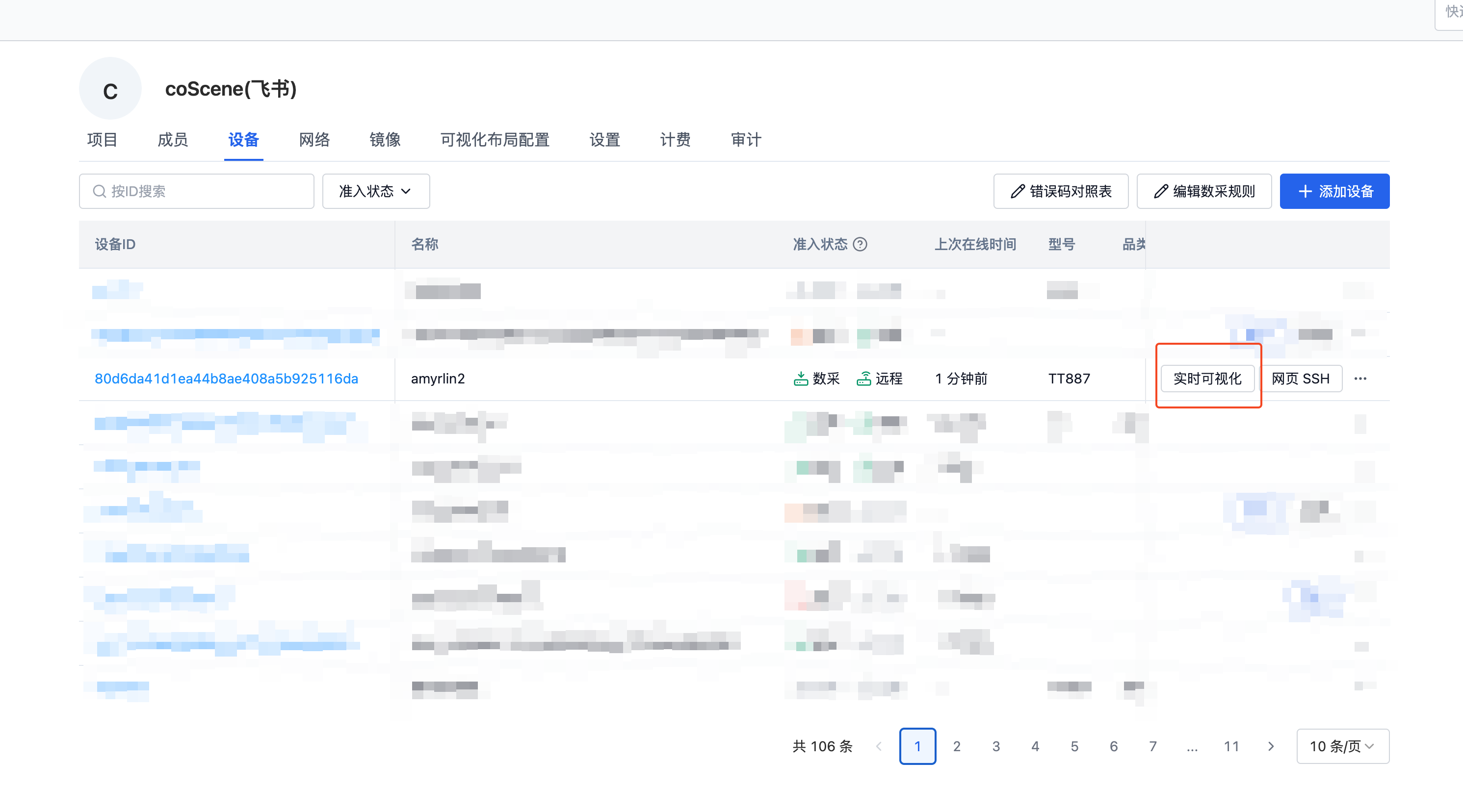
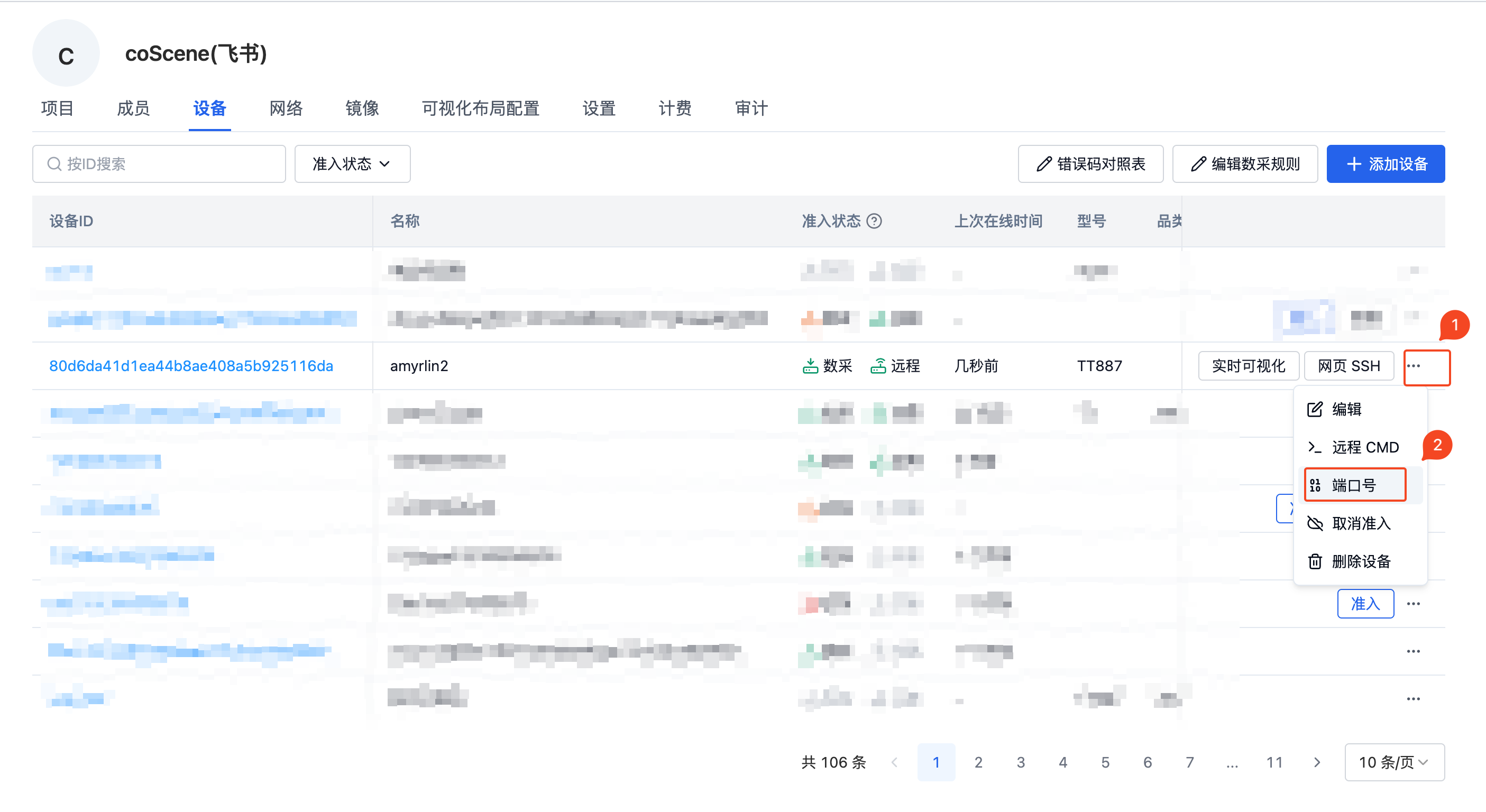
当设备准入后,在「组织管理」里「设备」页面列表查看设备,设备会出现【实时可视化】的按钮,点击之后即可连接到机器实时展示机器的实时情况。
网页 SSH
当设备准入后,在「组织管理」里「设备」页面列表查看设备,设备会出现【网页 SSH】的按钮,点击之后即可在浏览器中打开新的 Tab 通过 SSH 连接到机器。

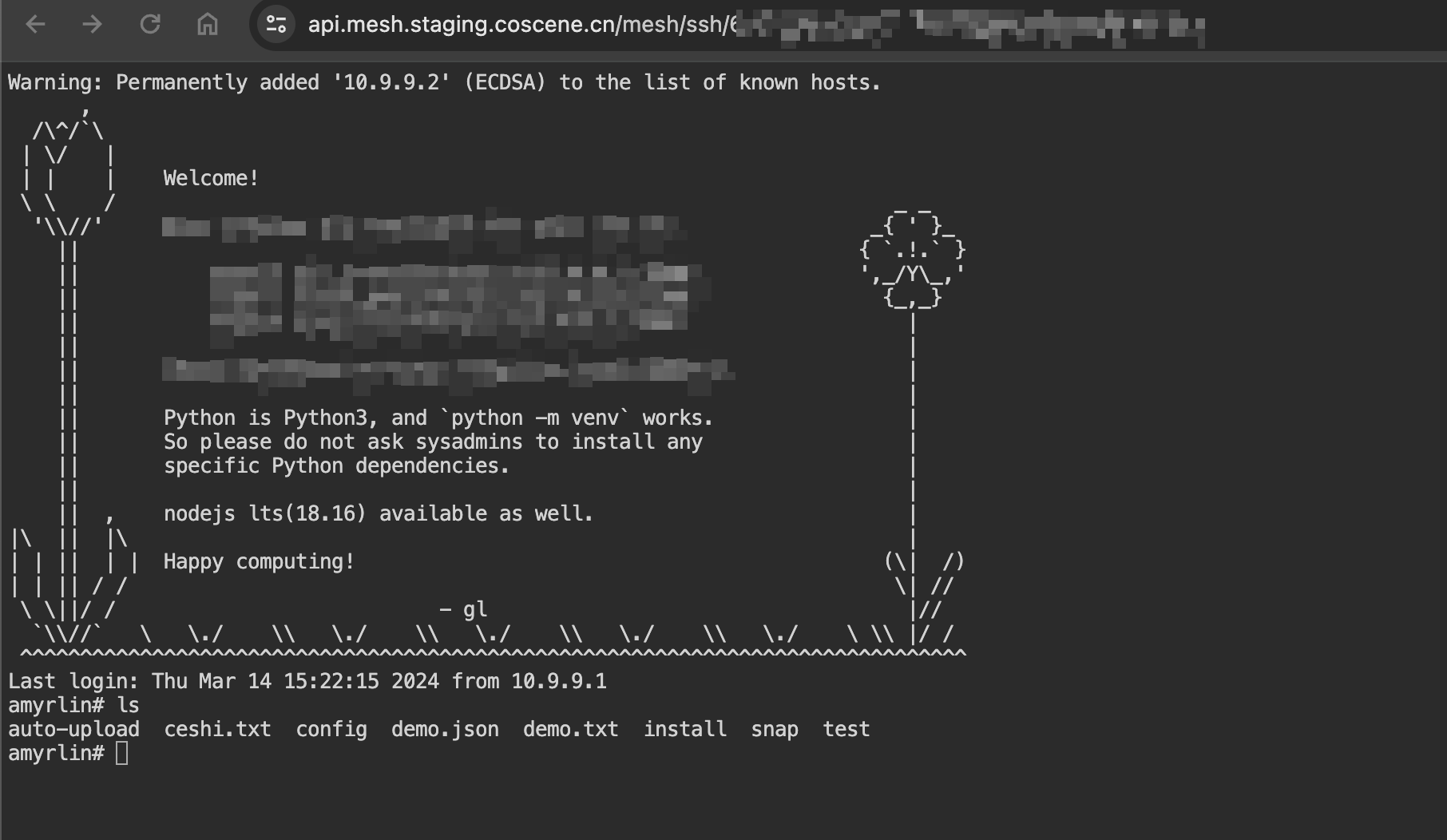
页面默认提供了 Trzsz 文件传输工具,用户可以通过trz file1 命令上传本地的文件至远程机器端,通过 tsz file1 file2 file3 将远程机器的文件下载到本地机器上。更为复杂的命令使用请参考详细说明文档。
远程 CMD
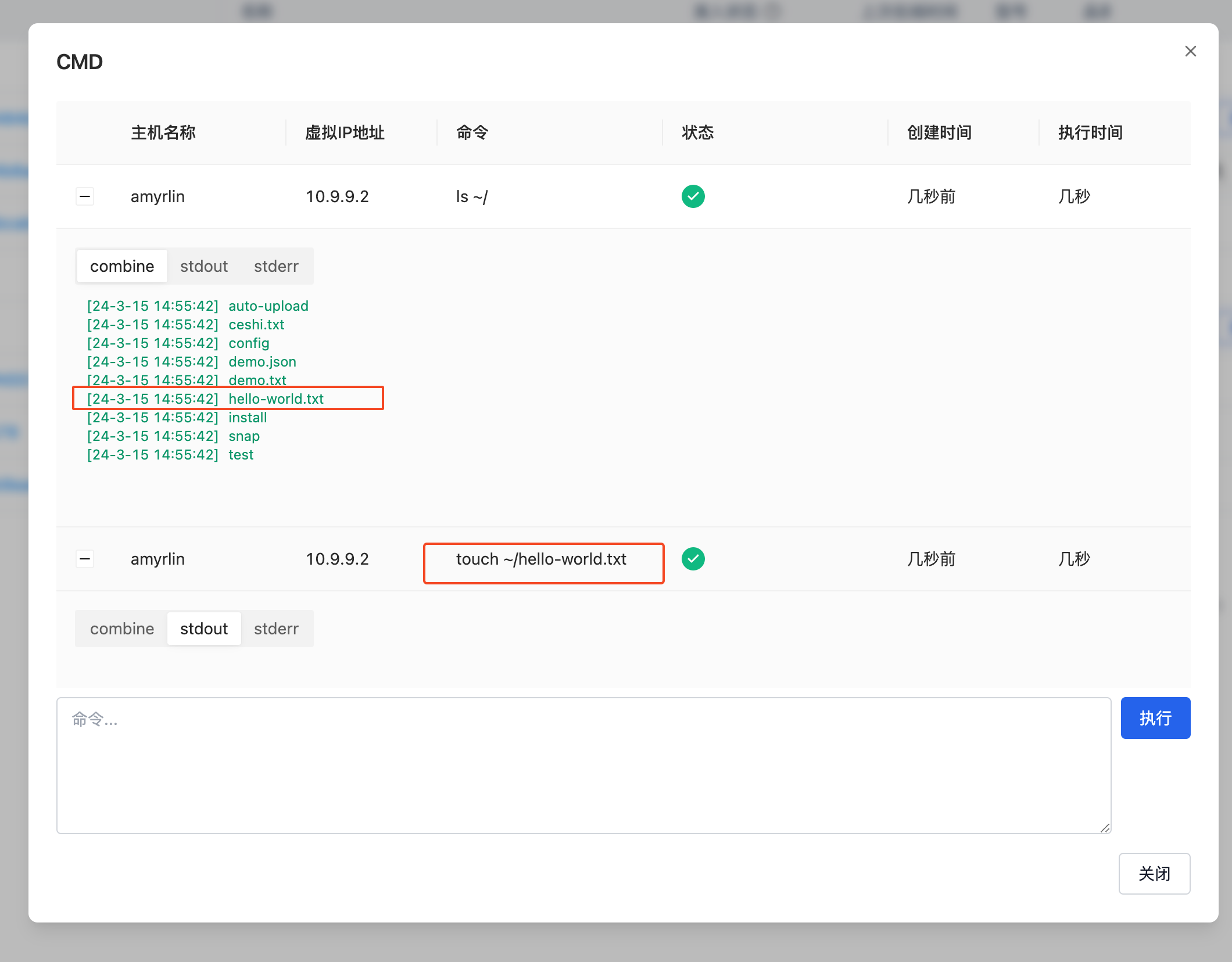
当机器实时在线时,用户可以通过远程 CMD 功能对机器进行命令下发操作,执行特定的任务。

点击【远程 CMD】按钮,进去操作页面。示例中执行 touch ~/hello-world.txt 命令,创建一个名为hello-world.txt 的文件。
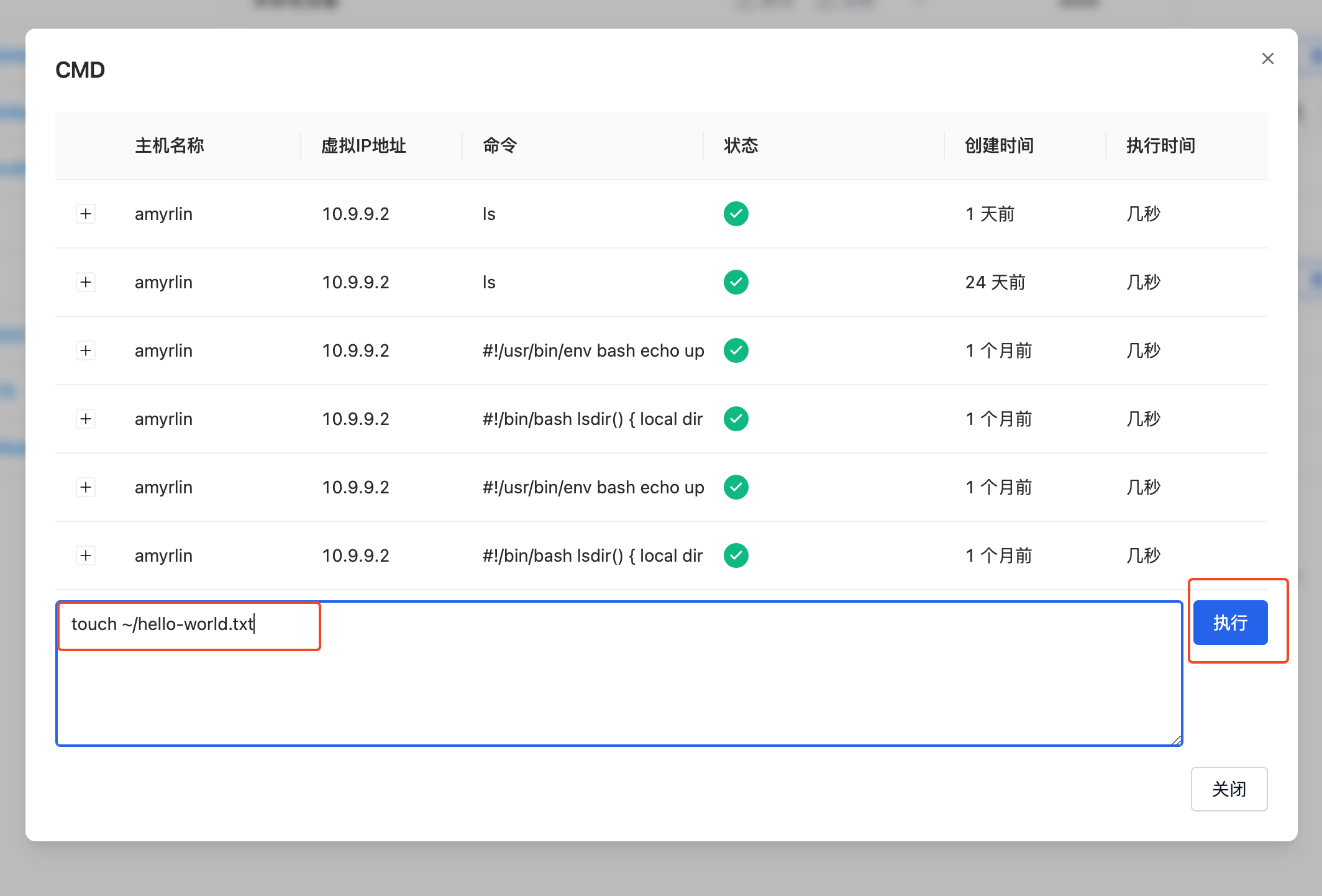
然后再执行 ls ~/ 命令获取所有文件信息,通过执行命令历史记录的结果可以看出,命令均成功执行。
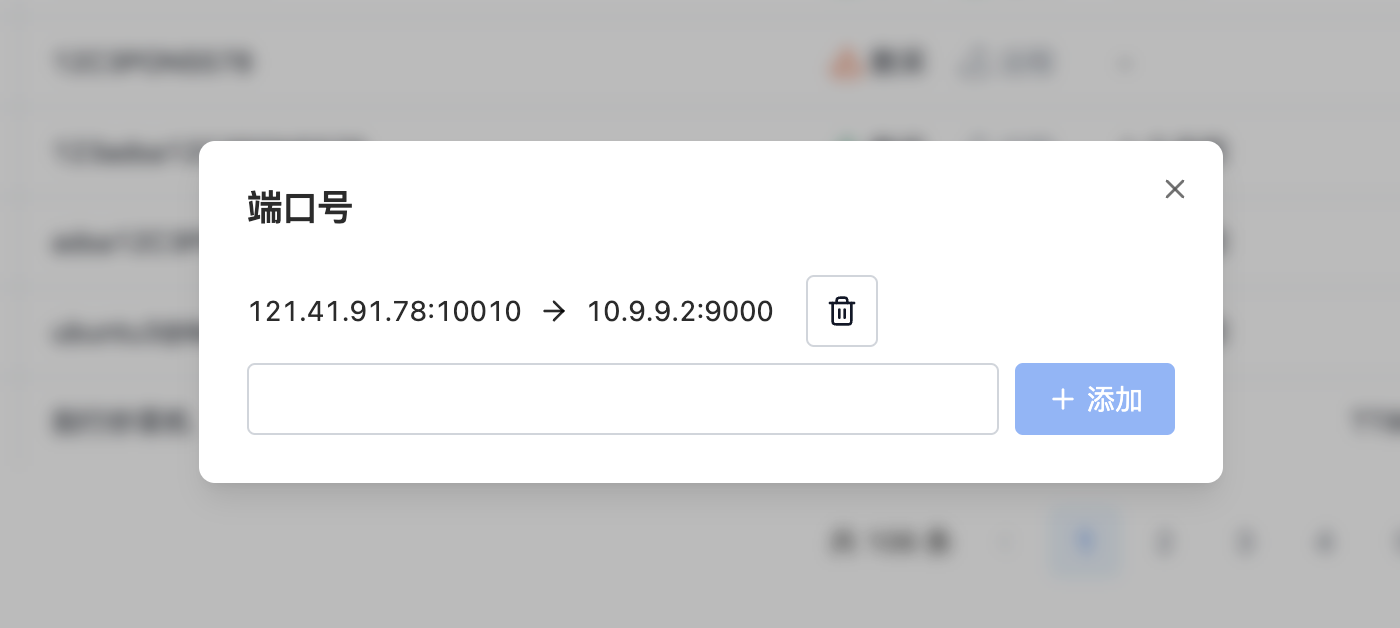
端口号映射
当机器端没有公网 IP 时,用户无法直接访问机器的端口,而端口号映射功能可以将机器端的端口进行转发,使得可以被用户在公网进行访问。例如可以将机器端运行的服务暂时暴露,本地连接进行调试等操作。
我们这里操作一个简单的示例。通过【网页 SSH】功能我们连接到远端机器,在机器上执行命令 python3 -m http.server 9000 -d ~ 运行一个简单的 HTTP Server,会将~目录下的文件作为静态文件提供给用户访问。Server 监听了 9000 的端口,然后我们配置对机器端 9000 的端口进行转发。此时我们在本地浏览器请求映射后的地址,即可将请求转发至机器端。
-
网页端配置 9000 端口映射
-
通过网页 SSH 在机器端执行
python3 -m http.server 9000 -d ~启动简易 HTTP Server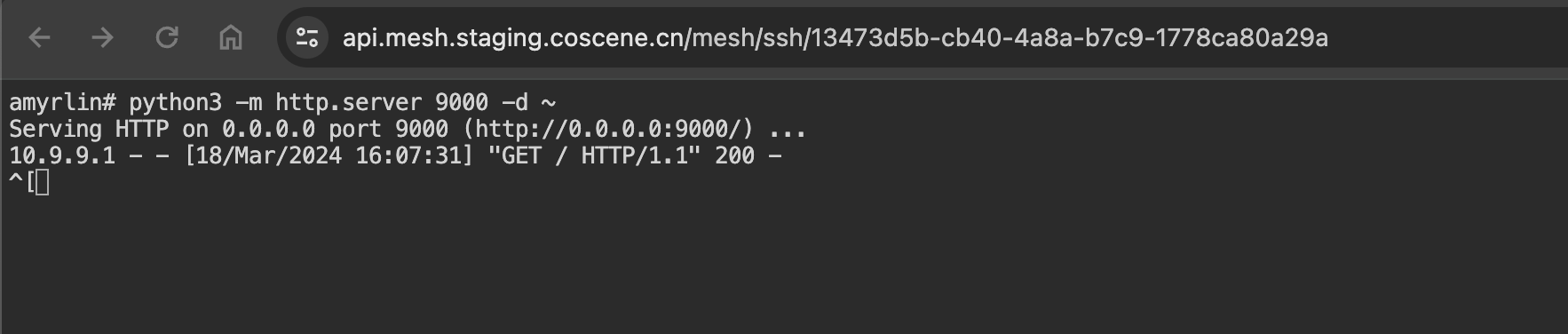
-
在浏览器中请求相关地址,发现列举了机器端
~目录下的所有文件信息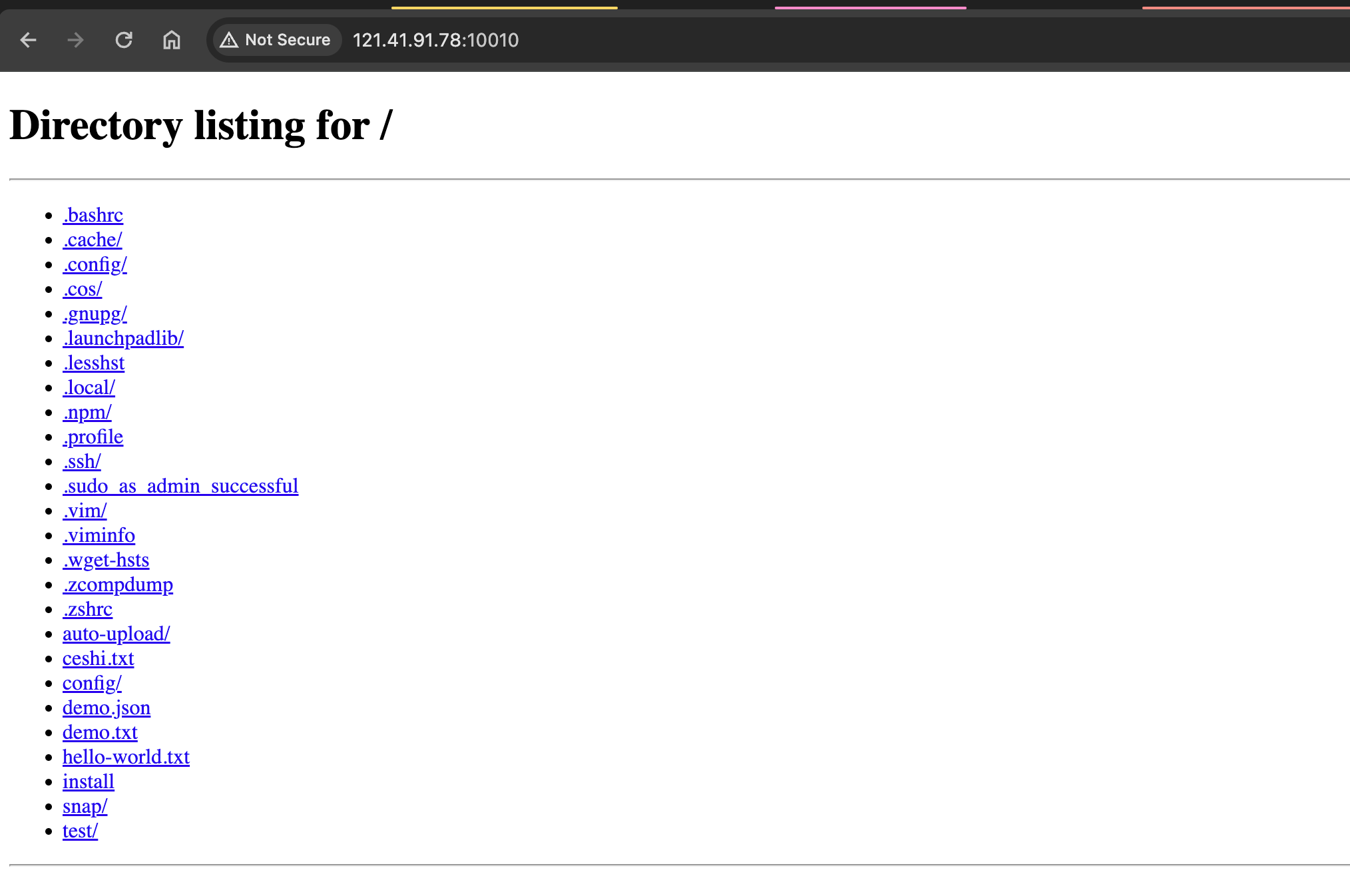
-
查看机器端的日志信息,发现浏览器的请求已经转发到了机器端,并且返回了 200 标识请求成功。