数采规则
准入的设备可按数据采集规则,将数据自动上传到项目中。数采规则应用于所有设备共用一套配置,如果需要按照项目划分采集规则,请参考关于数据自动采集与诊断 使用规则引擎来处理满足相关需求。
关于数采规则
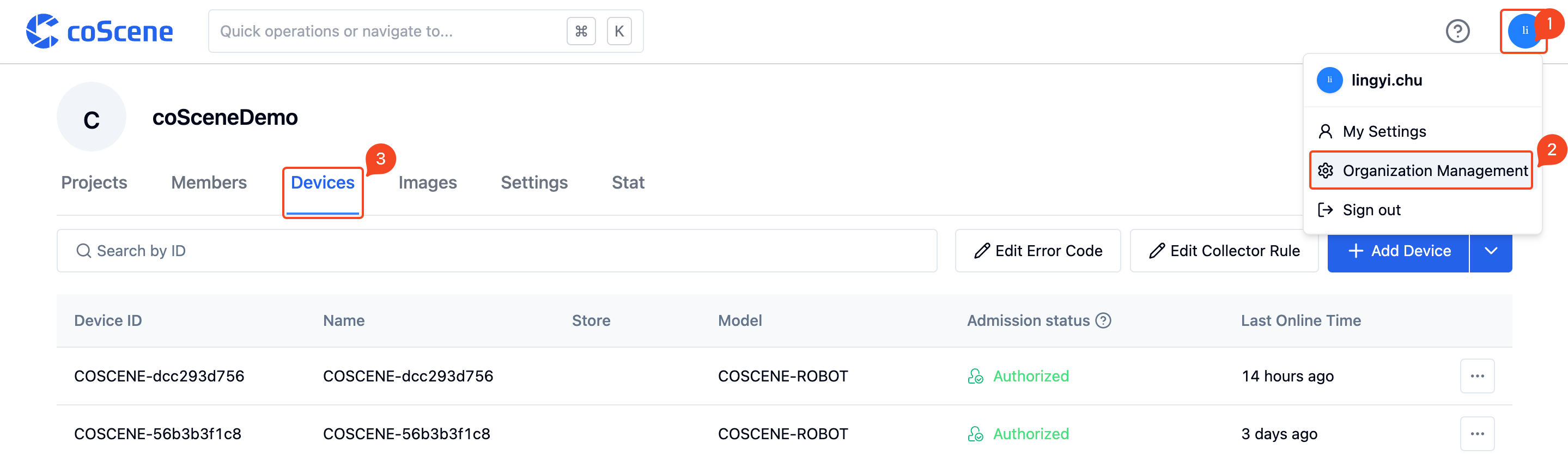
数采规则应用于组织中的全部设备,仅组织管理员可编辑
数采规则定义需要监控的设备日志所在目录、设备信息文件的存放目录等。当设备准入之后,设备会主动拉取组织配置的数采规则信息,依据配置的规则在机器端动态运行。
编辑数采规则
数采规则的结构格式参见下文。
进入组织管理页面的「设备」分页,点击【编辑数采规则】按钮。
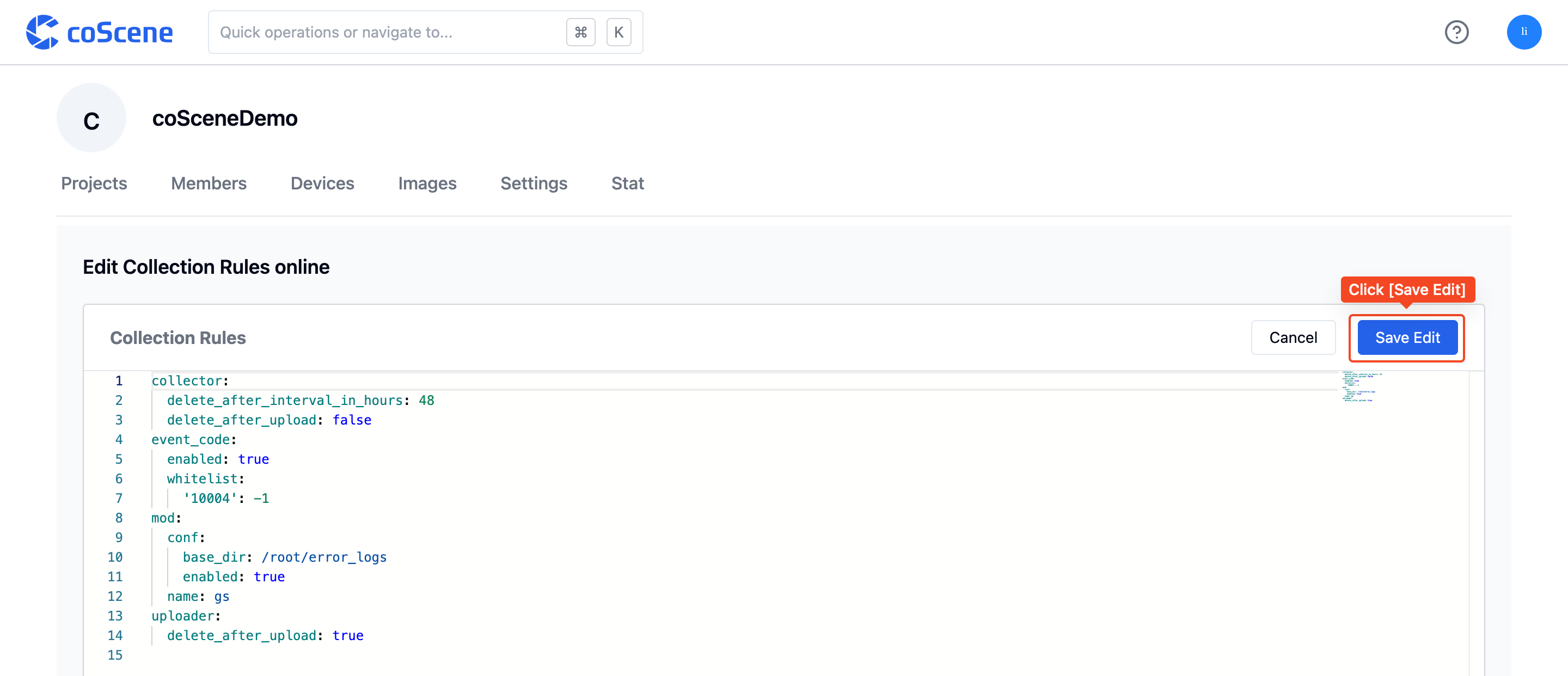
在线编辑数采规则,在完成配置后点击【保存编辑】。
数采规则格式
数采规则主要对三个模块进行设置:
- 数据收集器设置(collector):完成数据采集后,是否删除设备端数据
- 存储设置(mod):设备端数据的存储目录;设备标识文件的地址
- 更新设置(updater):当前程序是否开启自动更新
示例数采设备信息文件如下:
collector:
delete_after_upload: true # 默认值为 False
delete_after_interval_in_hours: 48 # 默认值为 -1,即不删除文件
scan_interval_in_secs: 60 # 默认值:60,即 60s 对文件夹扫描一次
mod:
name: 'default' # mod 名称,默认 default,定制版请联系刻行产品了解详细信息
conf:
enabled: true # 是否启用,默认为 true
robot_file: '/root/.ros/sn.txt' # 设备标识文件,用于存放设备唯一标识码,如 sn
# 设备端的监听目录,作为项目中数据采集任务与规则采集的指定目录
base_dirs:
- /home/bag/
- /home/log/
updater:
enabled: false # Enable Auto Update, default false
数据收集器设置
设置完成数据采集后,是否删除设备端数据,以释放设备端硬盘存储
# 数据收集器设置
collector:
delete_after_upload: true # 默认值为 False
delete_after_interval_in_hours: 48 # 默认值为 -1,即不删除文件;否则默认会删除 48 小时以前的旧数据
scan_interval_in_secs: 60 # 默认值:60,即 60s 对文件夹扫描一次
存储设置
设置设备端数据的存储地址
# 数据处理设置,可定制,具体信息请咨询刻行产品了解详细过程
mod:
name: 'default' # mod 名称,默认 default,定制版请联系刻行产品了解详细信息
conf:
enabled: true # 是否启用,默认为 true
robot_file: '/root/.ros/sn.txt' # 设备标识文件,用于存放设备唯一标识码,如 sn
# 设备端的监听目录,作为项目中数据采集任务与规则采集的指定目录
base_dirs:
- /home/bag/
- /home/log/
更新设置
设置是否自动更新数采程序
# 更新设置
updater:
enabled: true # 是否自动更新数采程序,默认值为 true