远程操控面板
远程操控面板使您能够通过发布 geometry_msgs/Twist 或 geometry_msgs/msg/Twist 消息到指定主题(Topic)来控制机器人。要使用此面板远程操控机器人,您需要先通过 coBridge 建立与机器人的通信连接。
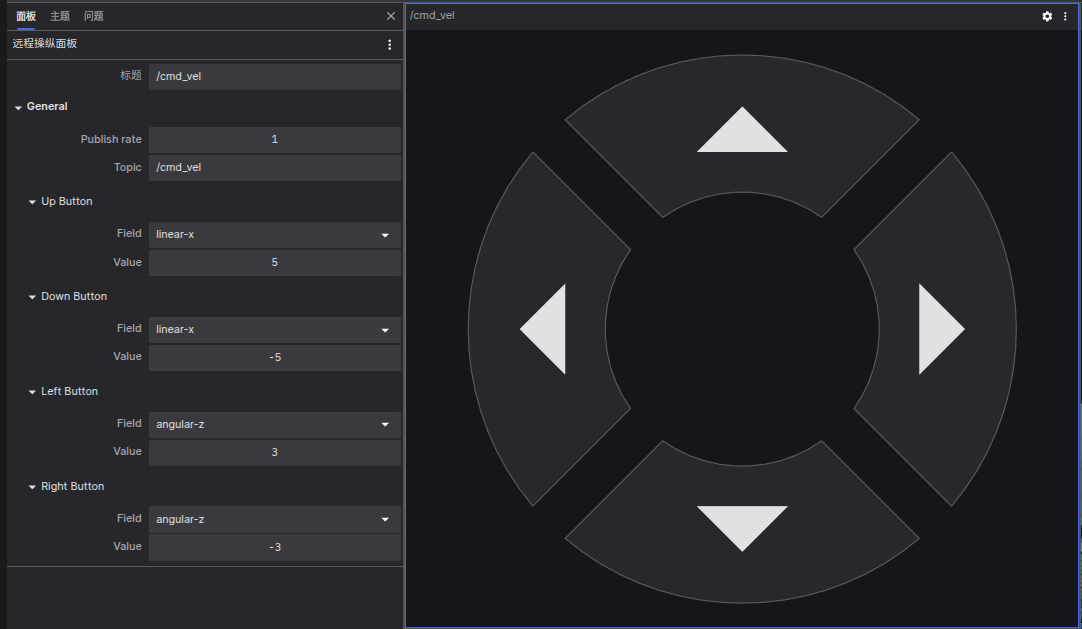
配置参数
- 发布频率 (Publish rate):控制 Twist 消息的发送频率
- 主题名称 (Topic):指定发布 Twist 消息的目标主题
- 方向控制按钮:配置上/下/左/右按钮对应的运动参数
- 可分别设置线性速度(x、y、z)和角速度的对应数值
支持的消息类型
- ROS 1:
geometry_msgs/Twist - ROS 2:
geometry_msgs/msg/Twist
技术实现
远程操控面板是一个专用的发布器面板,其核心功能是通过 coBridge 向机器人发送控制指令。要实现远程操控功能,机器人端需要配置相应的组件来处理接收到的控制消息。