Teleop Panel
The Teleop Panel allows you to remotely control your robot by publishing geometry_msgs/Twist or geometry_msgs/msg/Twist messages on a specified topic. To remotely operate a connected robot using this panel, you need to establish communication with the robot via coBridge.
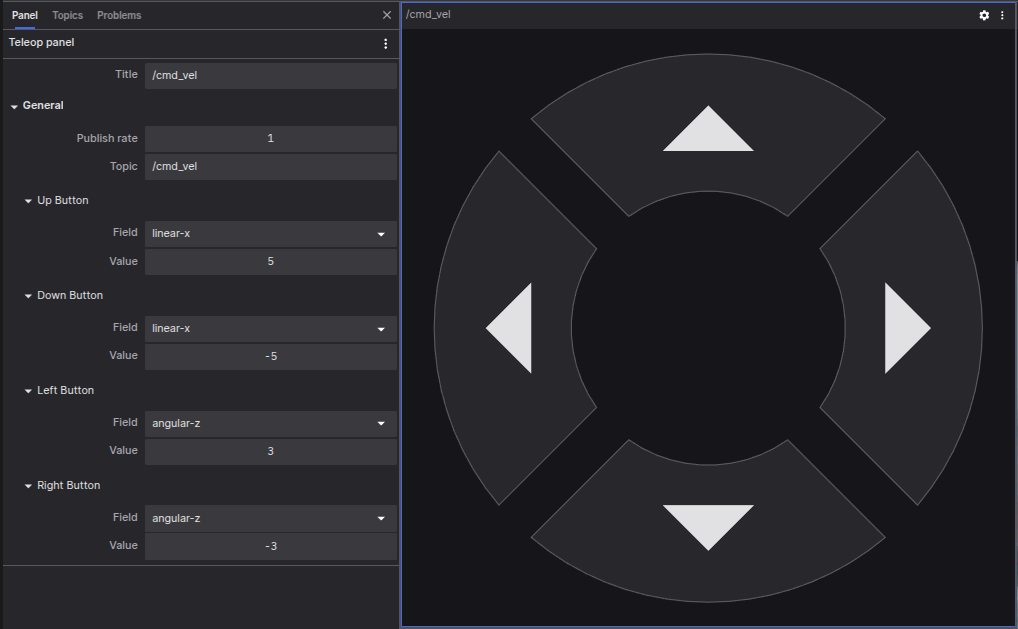
Configuration Parameters
- Publish Rate: Control the frequency of publishing Twist messages
- Topic: Specify the topic for publishing Twist messages
- Direction Control Buttons: Configure the movement parameters for Up/Down/Left/Right buttons
- You can set corresponding values for linear velocity (x, y, z) and angular velocity
Supported Message Types
- ROS 1:
geometry_msgs/Twist - ROS 2:
geometry_msgs/msg/Twist
Technical Implementation
The Teleop Panel is a specialized publish panel, with its core functionality being sending control commands to the robot via coBridge. To achieve remote control functionality, the robot side needs to have corresponding components configured to process the received control messages.